15. Parameter Optimization Solution
def twiddle(tol=0.2):
p = [0, 0, 0]
dp = [1, 1, 1]
robot = make_robot()
x_trajectory, y_trajectory, best_err = run(robot, p)
it = 0
while sum(dp) > tol:
print("Iteration {}, best error = {}".format(it, best_err))
for i in range(len(p)):
p[i] += dp[i]
robot = make_robot()
x_trajectory, y_trajectory, err = run(robot, p)
if err < best_err:
best_err = err
dp[i] *= 1.1
else:
p[i] -= 2 * dp[i]
robot = make_robot()
x_trajectory, y_trajectory, err = run(robot, p)
if err < best_err:
best_err = err
dp[i] *= 1.1
else:
p[i] += dp[i]
dp[i] *= 0.9
it += 1
return p
This follows Sebastian's pseudocode very closely. Before each run we make a new
Robot
with
make_robot
, ensuring on each run the robot starts from the same position. You may find it fruitful to change the magic numbers altering
p
and
dp
.
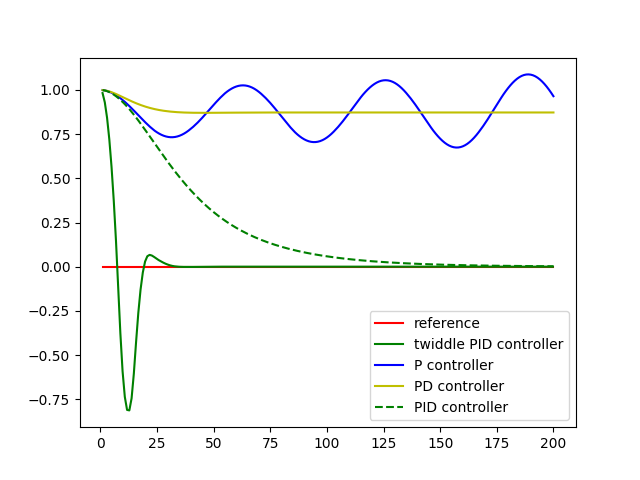
Now the PID controller outshines PD controller! Also, with twiddle the PID controller converges faster but we overshoot drastically at first so it's a tradeoff. Try tuning twiddle and see if you can reduce the overshoot.
Parameter Optimization Solution - Artificial Intelligence for Robotics